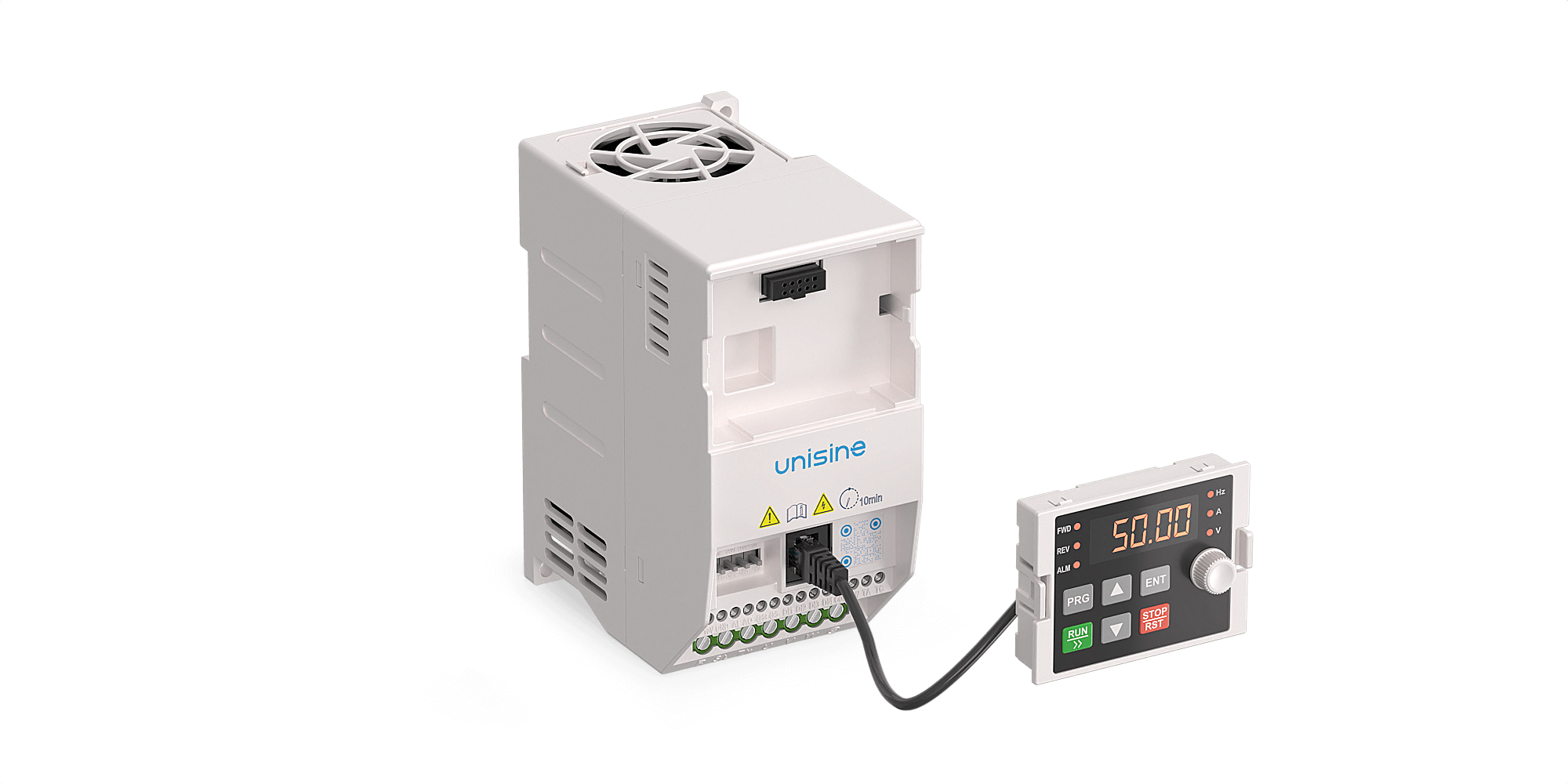
FD20 series frequency inverter is the latest mini size low-power variable frequency drive (VFDs) developed by our company, which integrates years of product and market experience from our research and development team.
Full functionality including PID, photovoltaic water supply, constant pressure water supply, etc.
V/f and open-loop vector control
Standard Modbus communication capability
More powerful control core
Our master control system employs a more powerful core, more efficient motor control algorithms making it more adept at handling various high-performance applications.
Better heat dissipation performance
We have specially designed a cooling system for the compact structure, with air duct isolation. We conducted thermal simulations for the entire series to ensure the cooling effect, thereby making the FD20 perform stably and reliably.
Keyboard with removable external connectors
This device is equipped with standard interfaces, which can be used for external connection of the local keyboard.
Supports wall-mounted installation and rail-mounted installation
0.4~5.5kW models support DIN rail mounting
Parameters
Item
Value
Input Voltage, Frequency
Three - phase AC380V±5%, 50/60Hz Single - phase AC220V±5%, 50/60Hz
Voltage Allowable Fluctuation Range
Three - phase AC380V - 450V Single - phase AC190V - 250V
Voltage
0 - 280V
Frequency
G - type: 0 - 500Hz; V/F control: 0 - 500Hz
Overload Capacity
G - type: 150% rated current for 60s, 180% rated current for 3s P - type: 120% rated current for 60s, 150% rated current for 3s
Control Method
V/F control, vector control without speed sensor (SVC)
Frequency Setting Resolution
Digital input: Maximum frequency × 0.025% or 0.01Hz Analog input: 0.01Hz
V/F Curve
Three types: linear type, multi - point type, Nth power V/F curve
Torque Boost
Two modes: automatic, manual Manual setting: rated output voltage 0 - 30.0% Automatic: voltage compensation according to load current
No - load self - learning: complete motor parameter self - learning in no - load and steady state for best control effect Full - load self - learning: complete self - learning under full - load current impact, with over - current suppression function
Current Limit Control
Specifically for applications with low grid voltage or frequent undervoltage trips; within allowable voltage range, system uses unique algorithm and load distribution logic to maintain longest possible operation time
Multi - stage Speed and PID Operation
16 multi - stage speeds for frequency conversion. Multiple operation modes selectable: PID operation, preset frequency, central frequency, memory of motor status and restoration
PID Control
Internal PID controller (closed - loop frequency conversion)
RS485 Communication
Standard configuration RS485 communication interface Baud rate: 4800 - 115200bps (adjustable, default 9600bps) Communication protocol: MODBUS - RTU protocol (default), can be set to other protocols via modification
Digital Input
Up to 8 digital inputs (can be expanded), supports various control modes like multi - stage speed, simple PLC, PID, etc. 1 route analog input (TA/TC), supports 0 - 10V or 4 - 20mA optional, can be set as frequency setting or torque setting
Analog Output
1 route analog output, output range 0 - 20mA or 0 - 10V adjustable, can realize output frequency, output current, etc.
Automatic Energy Saving Operation
Adjustable according to load, steady - state, non - steady - state, three types selectable for best energy saving effect
Jogging
0 - 650.0s continuously adjustable, S - type, linear type selectable
Timing
Built - in real - time clock, accurate to second, supports timing start, timing stop
Braking
Energy - consuming braking, DC braking and braking resistor can be connected Braking time: 0.0 - 30.0s adjustable; braking current: 0 - 100% rated current adjustable DC braking start frequency: 0.00Hz - 60.00Hz adjustable; maximum DC braking current: selectable
Deceleration Stop and Speed Reversal Function
Reversal can be realized during deceleration stop, maximum frequency motor current
Carrier Frequency Adjustment
Can realize smooth transition of carrier frequency during acceleration/deceleration, reduce motor noise
Inverter Operation
Internal counter one, convenient for system integration
Function
Up/down frequency setting, frequency jump operation, reverse rotation prohibition, transfer frequency compensation, RS485 communication, frequency setting increment/decrement, fault self - recovery, etc.
Please fill out the form below to request a quote or to request more information about us. please be as detailed as possible in your message, and we will get back to you as soon as possible with a response. we’re ready to start working on your new project.